Минибот - полицейский
Описание
Попробуем воссоздать из робота полицейскую машину. Или машину скорой помощи. Для этого поместим на робота мигалки и сигнализацию. И оставим режим движения по объезду препятствий.
Дополнительные модули
Предполагается что у Вас уже есть набор Минибот, и вы собрали его по инструкции в руководстве пользователя. Тогда дополнительно понадобится:
| Что нужно | Кол-во, шт |
|---|---|
| Модуль адресных светодиодов | 2 |
| Модуль зуммера | 1 |
Библиотеки
Порядок действий
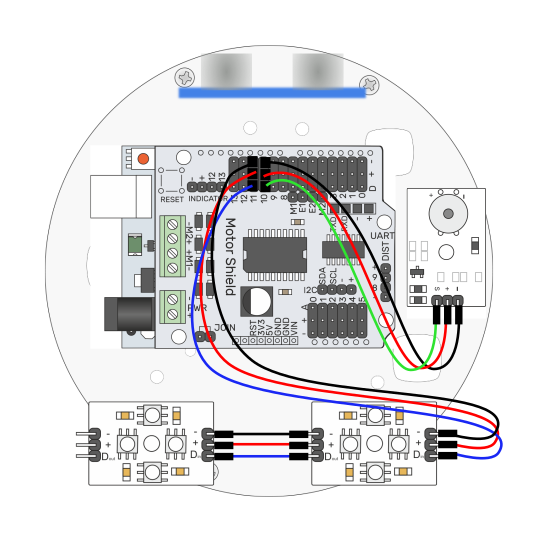
Шаг 1. Пересоберите робота
- С помощью отвёртки, входящей в комплект набора, снимите с платформы модуль ИК-приёмника
- С помощью отвёртки, входящей в комплект набора, прикрепите на место модуля ИК-приёмника - Модуль зуммера
- Присоедините модуль зуммера с помощью трёхпроводного шлейфа к выводам D10 мотор шилда.
- С помощью отвёртки, входящей в комплект набора, снимите с платформы модуль 4-х разрядного индикатора
- С помощью отвёртки, входящей в комплект набора, прикрепите на нижние крепления модуля 4-х разрядного индикатора - два модуля адресных светодиодов
- Присоедините один из модулей адресных светодиодов с помощью трёхпроводного шлейфа к выводам D11 мотор шилда.
- Соедините между собой модули адресных светодиодов трёхпроводным шлейфом.
Шаг 2. Установите библиотеки
Установите в Arduino IDE библиотеки, которые представлены по ссылкам выше. О том как устанавливаются библиотеки описано в руководстве пользователя, входящем в комплект, либо посетите соответствующий раздел Базы Знаний.
Зачем нужна библиотека для зуммера?
Внимание! Подразумевается что библиотеки для входящих в набор модулей вы уже установили так как это описано в руководстве пользователя!
Шаг 3. Загрузите скетч на контроллер
Шаг 4. Робот вперёд!
Отсоедините кабель от контроллера, поставьте платформу на ровную поверхность и переведите переключатель питания в положение ON. Робот будет передвигаться прямо до препятствия, стараясь обогнуть его. При этом у робота включена световая и звуковая сигнализация. Световая сигнализация попеременно меняет цвет (красный и синий), звуковая - меняет тон. Получаем настоящую машину экстренных служб.